
通信原理
重点章节在数字基带传输系统和数字带通传输系统。
绪论
通信系统可分为模拟通信系统和数字通信系统。与模拟通信相比,数字通信系统具有抗干扰能力强,可消除噪声积累;差错可控;数字处理灵活,可以将来自不同信源的信号综合到一起传输;易集成,成本低;保密性好等优点。缺点是占用带宽大,同步要求高。
通信系统模型
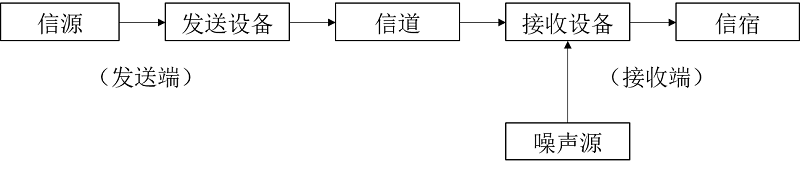
通信系统模型
引用一句王帅的话,通信原理这本书的作者很可能对真实通信系统理解不好。噪声究竟是加在什么地方,这一个简单的问题就能表现。对于一个通信系统而言,信道中往往是不携带噪声的,以MIMO系统为例,实际通信系统模型为\(y=Hx+n\),噪声是在经过信道之后加入的等效总噪声。那么真实条件下噪声出现在什么地方呢?显然不会出现在信道,而发射机经过dsp与模拟波束成形等操作之后的信号显然也不会叠加较大的噪声,那么噪声只有可能出现在接收机了。王帅对其的解释正是,噪声出现在接收机,这也是接收机使用LNA进行放大的原因之一。
通信系统的主要性能指标
有效性
指传输一定信息量所占用的频带宽度,即频带利用率。
频带利用率
\[\eta=\frac{R_b}{B}(Baud/Hz)\]其中,\(R_b=R_Blog_2M=\frac{1}{T_s}log_2M (b/s)\),为信息传输速率。
可靠性
指传输信息的准确程度。模拟系统一般用信噪比来衡量,数字通信系统的可靠性可用差错概率来衡量,常用误码率和误信率来表示。
误码率$P_e$
\[P_e=\frac{错误码元数}{传输总码元数}\]误信率$P_b$
\[P_b=\frac{错误比特数}{传输总比特数}\]随机过程
随机过程基本概念
随机过程是在时间进程中处于不同时刻的随机变量的集合。
均值(数学期望)
\[E[\xi(t)]=\int^{\infty}_{-\infty}xf_1(x,t)dx\]常记为\(a(t)\)。
方差
\[D[\xi(t)]=E\{[\xi(t)-a(t)]^2\}\]常记为\(\sigma^2(t)\)。
相关函数
自相关函数:
\[\begin{align} R(t_1,t_2)&=E[\xi(t_1)\xi(t_2)]\\&=\int_{-\infty}^{\infty}\int_{-\infty}^{\infty}x_1x_2f_2(x_1,x_2;t_1,t_2)dx_1dx_2 \end{align}\]协方差函数:\(B(t_1,t_2)=R(t_1,t_2)-a(t_1)a(t_2)\)
互相关函数:\(R_{\xi\eta}=E[\xi(t_1)\eta(t_2)]\)
平稳随机过程
定义
严平稳随机过程:随机过程的统计特性与时间起点无关,即时间平移不影响其任何统计特性。
宽平稳随机过程:①均值与\(t\)无关,为常数\(a\);②自相关函数只与时间间隔\(\tau=t_2-t_1\)有关,即\(R(t_1,t_1+\tau)=R(\tau)\)
各态历经性
平稳过程的统计平均值等于它的任一次实现的时间平均值,即满足
\[\left\{ \begin{array}{} a=\overline{a}\\ R(\tau)=\overline{R(\tau)} \end{array} \right.\]平稳过程的自相关函数与功率谱密度
自相关函数性质:
- 统计平均功率:\(R(0)=E[\xi^2(t)]\)
- 偶函数:\(R(\tau)=R(-\tau)\)
- 有界性:\(\mid R(\tau)\mid \le R(0)\)
- 直流功率:\(R(\infty)=E^2[\xi(t)]=a^2\)
- 交流功率:\(R(0)=R(\infty)=\sigma^2\)
功率谱密度:维纳—辛钦定理:
\[\left\{ \begin{array}{} P_{\xi}(f)=\int^{\infty}_{-\infty}R(\tau)e^{-j\omega\tau}d\tau\\ R(\tau)=\frac{1}{2\pi}\int^{\infty}_{-\infty}P_{\xi}(f)e^{j\omega\tau}d\omega \end{array} \right.\]即平稳随机过程的自相关函数与其功率谱密度互为傅里叶变换。
平稳随机过程通过线性系统
输出随机过程的均值
\[E[\xi_o(t)]=a_iH(0)\]输出随机过程的自相关函数
\[\begin{align} R_{\xi{_o}}(t,t+\tau)&=\int_{-\infty}^{\infty}\int_{-\infty}^{\infty}R_{\xi_i}(\tau+u-v)h(u)h(v)dudv\\&=R_{\xi{_o}}(\tau) \end{align}\]输出随机过程的功率谱密度
\[P_{\xi_o}(\omega)=\mathscr{F}[R_{\xi{_o}}(\tau)]\mid H(\omega^2)\mid\]重要结论:输出随机过程功率谱密度是输入过程功率谱密度乘以系统频率响应模值的平方。
窄带随机过程
\[\xi(t)=a_\xi(t)cos[\omega_ct+\varphi_\xi(t)]\]\(a_\xi(t)\)和\(\varphi_\xi(t)\)分别是\(\xi(t)\)的随机包络和随机相位,\(\omega_c\)为正弦波的中心角频率。
进行三角函数展开,改写为
\[\xi(t)=\xi_c(t)cos\omega_ct-\xi_s(t)sin\omega_ct\] \[\begin{align} \xi_c(t)=a_\xi(t)cos\varphi_\xi(t)\\ \xi_s(t)=a_\xi(t)sin\varphi_\xi(t) \end{align}\]\(\xi_c(t)\)及\(\xi_s(t)\)为别称为\(\xi(t)\)的同相分量和正交分量。对于均值为零的窄带平稳高斯随机过程\(\xi(t)\),其同相分量\(\xi_c(t)\)和正交分量\(\xi_s(t)\)同样为平稳高斯过程,而且均值为零,方差也相同,同一时刻上得到的\(\xi_c\)和\(\xi_s\)是互不相关或统计独立的。
\(\xi(t)\)、\(\xi_c(t)\)及\(\xi_s(t)\)独立同分布。
包络:\(a_\xi\)服从瑞利分布
\[f(a_\xi)=\frac{a_\xi}{\sigma_\xi^2}exp[-\frac{a_\xi^2}{2\sigma_\xi^2}],a_\xi\ge0\]相位:\(\varphi_\xi\)服从均匀分布
\[f(\varphi_\xi)=\frac{1}{2\pi},0\le\varphi_\xi\le2\pi\]正弦波加窄带高斯噪声
正弦波加窄带高斯噪声的混合信号为 \(r(t)=Acos(\omega_ct+\theta)+n(t)\) \(n(t)=n_c(t)cos\omega_ct-n_s(t)sin\omega_ct\)为窄带高斯噪声,均值为零,方差为\(\sigma_n^2\);\(\theta\)是正弦波的随机相位,在\((0,2\pi)\)上均匀分布。
于是,
\[\begin{align} r(t) &= [Acos\theta+n_c(t)]cos\omega_ct-[Asin\theta+n_s(t)]sin\omega_ct\\ &= z_c(t)cos\omega_ct-z_s(t)sin\omega_ct\\ &= z(t)cos[\omega_ct+\varphi(t)] \end{align}\]其中
\[\begin{align} z_c(t)=Acos\theta+n_c(t)\\ z_s(t)=Asin\theta+n_s(t) \end{align}\]包络:\(z(t)=\sqrt{z_c^2(t)+z_s^2(t)},z\ge0\),服从广义瑞利分布(莱斯分布)。小信噪比时退化为瑞利分布,大信噪比时近似高斯分布。
相位:\(\varphi(t)=arctan\frac{z_s(t)}{z_c(t)},0\le\varphi\le2\pi\)。
高斯白噪声和带限白噪声
白噪声
白噪声功率谱密度在所有频率上均为一常数,即\(P_n(f)=\frac{n_0}{2}\),其自相关函数为\(R(\tau)=\frac{n_0}{2}\delta(\tau)\)。这表明噪声仅在\(\tau=0\)时才相关,在其余任意时刻都是不相关的。由于带宽无限,故其平均功率为无穷大。
低通白噪声
白噪声通过理想低通滤波器或理想低通信道时输出的噪声称为低通白噪声。
功率谱密度:
\[P_n(f)=\left\{ \begin{array}{} \frac{n_0}{2}, &\mid f\mid\le f_H\\ 0,&其它\end{array}\right.\]自相关函数:
\[R(\tau)=n_0f_H\frac{sin2\pi f_H\tau}{2\pi f_H\tau}\]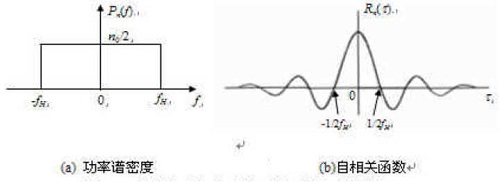
带限白噪声
由此可以看出,带限白噪声只有在\(\tau=k/2f_H\)上得到的随机变量才不相关。
带通白噪声
白噪声通过理想带通滤波器或理想带通信道时输出的噪声称为带通白噪声。
功率谱密度:
\[P_n(f)=\left\{ \begin{array}{} \frac{n_0}{2}, &f_c-B/2 \le \mid f\mid \le f_c+B/2\\ 0,&其它\end{array}\right.\]自相关函数:
\[R(\tau)=n_0B\frac{sin\pi B\tau}{\pi B\tau}cos2\pi f_c\tau\]窄带高斯白噪声
平均功率:\(N=N_0B\)
信道
定义
狭义信道:信号的传输媒质(在发送器和接收器之间的物理通路)
广义信道:除传输媒质外,还包括通信系统的某些设备所构成的部分
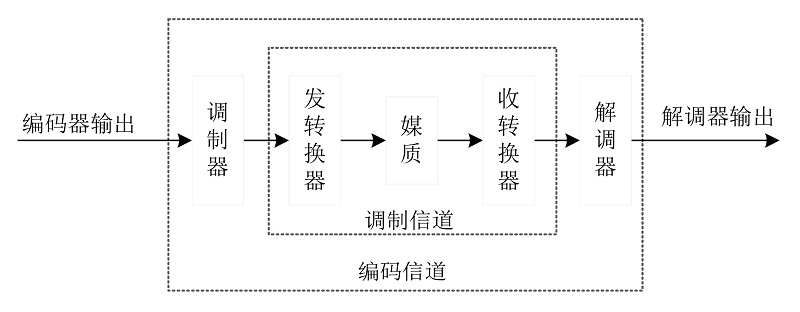
- 调制信道:从调制器输出端到解调器输入端
- 编码信道:从编码器输出端到译码器输入端
信道
信道数学模型
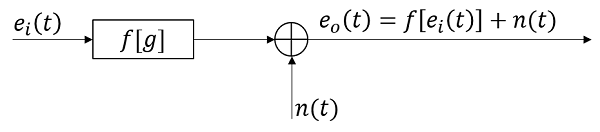
信道数学模型
\(f[.]\):信道线性算子
- 恒参信道:\(f[.]\)~非时变线性算子
- 时变信道:\(f[.]\)~时变线性算子
- 随参信道:\(f[.]\)~随时间随机变化
\(k(t)\)~乘性干扰,包括各种线性和非线性畸变
\(n(t)\)~加性噪声,与\(e_i(t)\)独立
编码信道模型
一种数字序列的变换,也称为离散或数字信道。包含调制信道$\rightarrow$依赖于调制信道的性能。噪声的干扰体现在误码上,关心的是误码率而不是失真情况$\rightarrow$使用转移概率来描述。
误码率:\(P_e=P(0)P(1/0)+P(1)P(0/1)\)
分类
1 按照传输媒质的不同,可分为:无线信道和有线信道
无线信道利用的是电磁波在空间中的传播。根据通信距离、频率和位置的不同,电磁波的传播主要分为地波、天波(电离层反射波)和视线传播。
2 按照信道特性不同,可分为:恒定参量信道和随机参量信道
(1)恒参信道
性质不随时间变化:线性时不变网络
举例:双绞线、同轴电缆、光纤、无线电视距中继、通信卫星中继信道、地球同步(GEO)/中轨道(MEO)/低轨道(LEO)卫星
对于有线电话信道,幅度-频率畸变将引起信号波形失真,相位-频率畸变对语音信号影响不大。
特性:引起幅频畸变和相频畸变,从而最终产生码间串扰
改善:均衡,使信道、均衡器联合频率特性在信号频率范围内无畸变。
(2)随参信道
多径传输且每条路径的衰减及时延都是随机变化的
举例:短波电离层反射、超短波流星余迹散射、超短波及微波对流层散射、短波电离层散射及超短波超视距绕射
特性:频率选择性衰落—信号频谱中某些分量的一种衰落
改善:分集接收。将接收到的多径信号分离成不相关的多路信号,然后将这些信号的能量按一定规则合并起来,使接收的有用能量最大。
对数字系统而言,使接收端的误码率最小。
对模拟系统而言,提高接收端的信噪比。分集方式:时间分集、频率分集
- 分集方式:时间分集、频率分级、空间分集
- 时间分集:采用时间交织与信道编码,在时间域内提供信号的副本
- 频率分集:在不同的载波频率上发送信号,在频率域内提供信号的副本
- 空间分集:利用多副天线实现
- 信号合并方式:\(r(t)=\sum\limits_{k=1}^{K}a_kr_k(t)\)
- 最佳选择式合并:选择信噪比最好的一路信号
- 等增益合并:各支路以相同的增益直接相加
- 最大比合并:各支路增益与本支路信噪比成正比
信道容量
离散信道容量
\[C_t=\mathop{max}\limits_{P(x)}\{r[H(x)-H(x/y)]\}\]连续信道容量
\[C_t=Blog_2(1+\frac{S}{n_0B})\]当给定\(S/n_0\)时,若带宽$B$趋于无穷大,信道容量不会趋于无穷大,而只是\(S/n_0\)的1.44倍。
模拟调制系统
调制的定义及分类
定义
把信号形式转换成适合在信道中传输的一种过程。
分类
广义的调制分为基带调制和带通调制(载波调制)。
载波调制又可以分为正弦波调制和脉冲调制。
正弦波调制: \(s_m(t)=A(t)cos[\omega_ct+\varphi(t)]\)
- 幅度调制:\(A(t)\)随调制信号\(m(t)\)成比例变化 \(\rightarrow\)线性调制
- 相位调制:\(\varphi(t)\)随\(m(t)\)成比例变化
- 频率调制:\(\frac{d\varphi(t)}{dt}\)随\(m(t)\)成比例变化 \(\rightarrow\)角度调制/非线性调制
作用和目的
- 在无线传输中,为了获得较高的辐射频率,天线的尺寸必须与发射信号的波长相比拟。而基带信号通常包含较低的频率分量,若直接发射,将使天线过长而难以实现。而把基带信号的频谱搬移至较高的频率上,就可以提高发射效率。
- 把多个基带信号分别搬移到不同的载频处,以实现信道的多路复用,提高信道利用率。
- 扩展信号带宽,提高系统抗干扰能力。
幅度调制的原理及其抗噪声性能
原理
时域:
\[s_m(t)=Am(t)cos(\omega_ct+\varphi_0)\]频域:
\[S_m(\omega)=\frac{A}{2}[M(\omega+\omega_c)+M(\omega-\omega_c)]\]已调信号的频谱是调制信号频谱的线性搬移。
幅度调制器模型
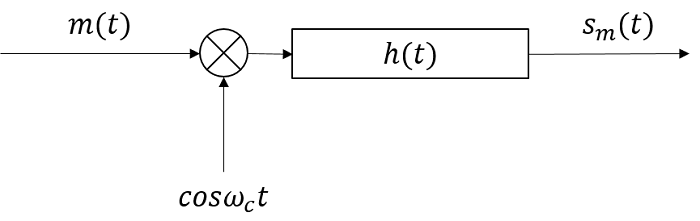
幅度调制器
根据\(m(t)\)、\(h(t)\)不同,可分为双边带调幅(DSB)、标准调幅(AM)、单边带调幅(SSB)、残留边带调幅(VSB)
标准调幅(AM):\(H(\omega)\)为全通网络,\(m(t)\)有直流成分
双边带调幅(DSB):\(H(\omega)\)为全通网络,\(m(t)\)无直流成分
单边带调幅(SSB):\(H(\omega)\)是截止频率为\(\omega_c\)的高通或低通滤波器
残留边带调幅(VSB):\(H(\omega)\)是特定的互补特性滤波器
常规调幅AM
- \[s_{AM}(t)=[A_0+m(t)]cos\omega_ct\]
- \[S_{AM}(\omega)=\pi A_0[\delta(\omega+\omega_C)+\delta(\omega-\omega_C)]+\frac{1}{2}[M(\omega+\omega_C)+M(\omega-\omega_C)]\]
- \[B_{AM}=2f_H\]
-
调制效率—有用功率(用于传输有用信息的边带功率)占信号总功率的比例
- \[\eta_{AM}=\frac{P_s}{P_{AM}}=\frac{\overline{m^2(t)}}{A_0^2+\overline{m^2(t)}}\]
-
当调制信号为单音余弦信号,即\(m(t)=A_mcos\omega_mt\)时,\(\overline{m^2(t)}=A_m^2/2\),此时\(\eta_{AM}=\frac{A_m^2}{2A_0^2+A_m^2}\)
-
在满调幅条件下,这时调制效率的最大值为\(\eta_{AM}=\frac{1}{3}\)
- 缺点:AM信号的功率利用率低。优点:系统结构简单,价格低廉。
抑制载波双边带调制DSB
- \[s_{DSB}(t)=m(t)cos\omega_ct\]
- \[S_{DSB}(\omega)=\frac{1}{2}[M(\omega+\omega_C)+M(\omega-\omega_C)]\]
- \[B_{DSB}=2f_H\]
- \(\eta_{DSB}=100\%\),全部功率都用于信息传输
- 包络与调制信号的规律不一致,不能用包络检波来恢复信号,需采用相干解调
单边带调制SSB
- 滤波法
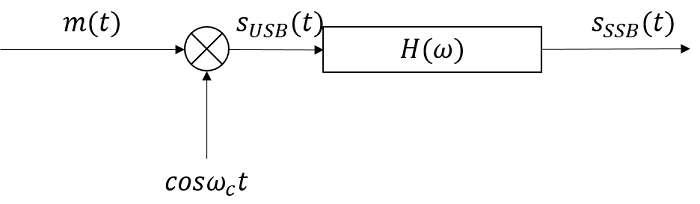
单边带调制-滤波法
SSB信号的频谱可表示为 \(S_{SSB}=S_{DSB}\bullet H(\omega)\) 保留上边带时
\[H(\omega)=H_{USB}(\omega)= \left\{ \begin{array}{} 1,& \mid\omega\mid>\omega_c\\ 0,& \mid\omega\mid\le\omega_c \end{array} \right.\]保留下边带时
\[H(\omega)=H_{LSB}(\omega)=\left\{\begin{array}{} 1,& \mid\omega\mid<\omega_c\\ 0,& \mid\omega\mid\ge\omega_c\end{array}\right.\]技术难点:边带滤波器的制作。实际滤波器在载频\(f_c\)处不具有陡峭的截止特性,而是有一定的过渡带。
- 相移法
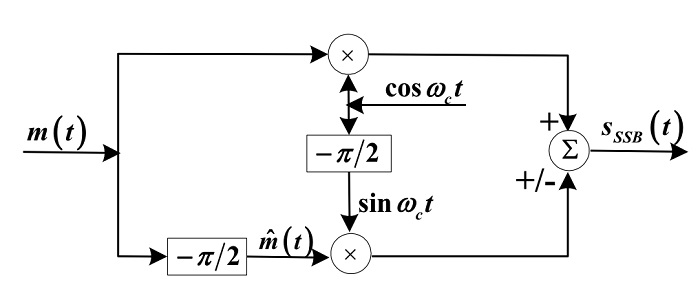
单边带调制-相移法
对于单频调制信号
\[m(t)=A_mcos\omega_mt\]其DSB信号的时域表达式为
\[\begin{align} s_{DSB}(t) &= A_mcos\omega_mtcos\omega_ct\\ &= \frac{1}{2}A_mcos(\omega_c+\omega_m)t+\frac{1}{2}A_mcos(\omega_c-\omega_m)t \end{align}\]保留上边带,则有
\[\begin{align} s_{USB}(t) &= \frac{1}{2}A_mcos(\omega_c+\omega_m)t\\ &= \frac{1}{2}A_mcos\omega_mtcos\omega_ct-\frac{1}{2}A_msin\omega_mtsin\omega_ct \end{align}\]保留下边带,则有
\[\begin{align} s_{LSB}(t) &= \frac{1}{2}A_mcos(\omega_c-\omega_m)t\\ &= \frac{1}{2}A_mcos\omega_mtcos\omega_ct+\frac{1}{2}A_msin\omega_mtsin\omega_ct \end{align}\]上下边带可以合并成
\[s_{SSB}(t) = \frac{1}{2}A_mcos\omega_mtcos\omega_ct\mp\frac{1}{2}A_msin\omega_mtsin\omega_ct\]推广到一般情况并用希尔伯特变换表示
\[s_{SSB}(t) = \frac{1}{2}m(t)cos\omega_ct\mp\frac{1}{2}\hat{m}(t)sin\omega_ct\]技术难点:宽带相移网络的制作。该网络必须对调制信号\(m(t)\)的所有分量均精确相移\(\pi/2\),这一点即使近似达到也是困难的。
- 不能用包络检波,需采用相干解调
残留边带调制VSB
残留边带信号的频谱为
\[\begin{align} S_{VSB}(\omega) &= S_{DSB}(\omega)\bullet H(\omega) \\ &= \frac{1}{2}[M(\omega+\omega_C)+M(\omega-\omega_C)]H(\omega) \end{align}\]其中,\(H(\omega)\)需满足
\[H(\omega+\omega_c)+H(\omega-\omega_c)=Constant, \mid\omega\mid\le\omega_H\]残留边带滤波器的截止特性在载频处具有互补对称的特性,又称滚降特性。
典型的滚降特性曲线:升余弦滚降
抗噪声性能
主要质量指标:解调器的输出信噪比
\[\frac{S_o}{N_o}=\frac{\overline{m_o^2(t)}}{\overline{n_o^2(t)}}\]为便于比较同类调制系统采用不同解调器时的性能,还可采用调制制度增益或信噪比增益G表示
\[G=\frac{S_o/N_o}{S_i/N_i}\]AM包络检波性能
大信噪比情况:包络检波的性能与相干解调相同
\[G=G_{max}=\frac{2}{3}\]小信噪比情况:有门限效应。小信噪比下,包络检波器把有用信号扰乱成噪声,输出信噪比急剧恶化。
DSB调制系统的性能(B=2W)
有用信号功率\(S_o=\overline{m_o^2(t)}=\frac{1}{4}\overline{m^2(t)}\)
噪声经相干解调、低通滤波器后输出为\(n_o(t)=\frac{1}{2}n_c(t)\)
输出噪声功率\(N_o=\overline{n_o^2(t)}=\frac{1}{4}\overline{n_c^2(t)}=\frac{1}{4}\overline{n_i^2(t)}=\frac{1}{4}N_0B=\frac{1}{2}N_0W\)
输入信噪比\(\frac{S_i}{N_i}=\frac{\frac{1}{2}\overline{m^2(t)}}{N_0B}=\frac{\frac{1}{2}\overline{m^2(t)}}{2N_0W}\)
输出信噪比\(\frac{S_o}{N_o}=\frac{\frac{1}{4}\overline{m^2(t)}}{\frac{1}{4}N_0B}=\frac{\overline{m^2(t)}}{2N_0W}\)
\[G=2\]SSB系统解调性能(B=W)
输入信噪比\(\frac{S_i}{N_i}=\frac{S_i}{N_0W}=\frac{\frac{1}{2}\overline{m^2(t)}}{4N_0W}\)
输出信噪比\(\frac{S_o}{N_o}=\frac{\overline{m^2(t)}}{4N_0W}\)
\[G=1\]是否说明DSB系统的抗噪声性能比SSB系统好呢?
不能。因为二者的输入信号功率不同、带宽不同,在相同的噪声功率谱密度$n_0$的条件下,输入噪声功率也不同,所以二者的输出信噪比是在不同条件下得到的。
若在相同的输入信号功率、相同的输入噪声功率谱密度、相同的基带信号带宽的条件下,可得出输出信噪比相等的结论。表明,二者的抗噪声性能是相同的。
角度调制的原理及其抗噪声性能
略
各种模拟调制系统的比较
| 调制方式 | 传输带宽 | 直流响应 | \(S_o/N_o\) | 设备复杂性 | 主要应用 |
|---|---|---|---|---|---|
| AM | 2W | 有 | \((\frac{S_o}{N_o})_{AM}=\frac{1}{3}(\frac{S_i}{n_0f_m})\) | 较小:调制与解调简单 | 无线电广播 |
| DSB | 2W | 无 | \((\frac{S_o}{N_o})_{DSB}=(\frac{S_i}{n_0f_m})\) | 中等:要求相干解调,常传输小导频 | 模拟数据传输;低带宽多路复用系统 |
| SSB | W | 无 | \((\frac{S_o}{N_o})_{SSB}=(\frac{S_i}{n_0f_m})\) | 较大:要求相干解调,调制器也较复杂 | 语音通信,话音频分多路通信 |
| VSB | 略大于W | 有 | 近似SSB | 较大:要求相干解调,调制器需要对称滤波 | 数据传输,宽带(电视)系统 |
| FM | \(2(m_f+1)W\) | 有 | \((\frac{S_o}{N_o})_{FM}=\frac{3}{2}m_f^2(\frac{S_i}{n_0f_m})\) | 中等:调制器较复杂,解调器较简单 | 数据传输;无线电广播;微波中继 |
频分复用(FDM)
信道带宽被分成多个相互不重叠的频段,每路信号占据其中一个子通道,并且各路之间留有未被使用的频带进行分隔,以防止信号重叠。在接收端,采用适当的带通滤波器将多路信号分开,从而恢复出所需要的信号。
数字基带传输系统

数字基带传输系统
数字基带信号及其频谱特性
数字基带信号
几种基带信号
单极性波形、双极性波形、单极性归零波形(RZ)、双极性归零波形、差分波形(相对码波形)、多电平波形等
归零波形使用半占空码,即占空比为50%。
数字基带信号的表达式
表示信息码元的单个脉冲的波形并非一定是矩形的。
数字基带信号可表示为
\[s(t)=\sum\limits^\infty_{n=-\infty}a_ng(t-nT_s)\]其中,\(a_n\)为第n个码元所对应的电平值,\(T_s\)为码元持续时间,\(g(t)\)为某种脉冲波形。
基带信号的频谱特性
将\(s(t)\)分解成稳态波\(v(t)\)和交变波\(u(t)\)。
稳态波$v(t)$的功率谱密度
稳态波为随机序列的统计平均分量,取决于每个码元内出现\(g_1(t)\)和\(g_2(t)\)的概率加权平均。
\[v(t)=\sum\limits^\infty_{n=-\infty}[Pg_1(t-nT_s)+(1-P)g_2(t-nT_s)]=\sum\limits^\infty_{n=-\infty}v_n(t)\]\(v(t)\)是以\(T_s\)为周期的周期信号。
其功率谱密度为
\[P_v(f)=\sum\limits^\infty_{m=-\infty}\mid f_s[PG_1(mf_S)+(1-P)G_2(mfs)]\mid^2\delta(f-mf_S)\]为离散谱。根据离散谱可以确定随机序列是否包含直流分量(m=0)和定时分量(m=1)。对于双极性信号,当\(g_1(t)=-g_2(t)=g(t)\),且概率\(P=1/2\)时,无离散分量。
交变波$u(t)$的功率谱密度
交变波\(u(t)\)是\(s(t)\)与\(v(t)\)之差,是一个随机脉冲序列
\[u(t)=\sum\limits^\infty_{n=-\infty}a_n[g_1(t-nT_S)-g_2(t-nT_S)]=\sum\limits^\infty_{n=-\infty}u_n(t)\]其中,
\[a_n= \left\{ \begin{array}{} 1-P&以概率P\\ -P&以概率1-P \end{array} \right.\]用截短函数和统计平均方法求其功率谱密度为
\[P_u(f)=f_sP(1-P)\mid G_1(f)-G_2(f)\mid ^2\]为连续谱。通常,根据连续谱可以确定随机序列的带宽。
\(s(t)\)的功率谱\(P_s(f)\)为
\[\begin{align} P_s(f) &=P_u(f)+P_v(f)\\ &=f_sP(1-P)\mid G_1(f)-G_2(f)\mid ^2+\sum\limits^\infty_{m=-\infty}\mid f_s[PG_1(mf_S)+(1-P)G_2(mfs)]\mid ^2\delta(f-mf_S) \end{align}\]书第137页例6-1给出了RZ和NRZ矩形脉冲序列的功率谱的推导过程。此处理解即可。
性质
- 二进制基带信号的带宽主要取决于单个码元波形的频谱函数,时间波形的占空比越小,占用频带越宽。
- 单极性基带信号是否存在离散线谱取决于矩形脉冲的占空比。单极性NRZ信号中没有定时分量,单极性RZ信号中含有定时分量。
基带传输的常用码型
传输码的码型选择原则
- 不含直流,且低频分量尽量少
- 应含有丰富的定时信息,以便于从接收码流中提取定时信号
- 功率谱主瓣宽度窄,以节省传输频带
- 不受信息源统计特性的影响,即能适应于信息源的变化
- 具有内在的检错能力,即码型应具有一定规律性,以便利用这一规律性进行宏观检测
- 编译码简单,以降低通信延时和成本
几种常用的传输码型
AMI码
编码规则:将消息码的“1”(传号)交替地变换为“+1”和“-1”,而“0”(空号)保持不变。
优点:没有直流成分,且高、低频分量少,编译码电路简单,且可利用传号极性交替这一规律观察误码情况;如果是AMI-RZ波形,接收后只要全波整流,就可变为单极性RZ波形,从中可以提取位定时分量。
缺点:当原信码出现长连“0”串时,信号的电平长时间不跳变,造成提取定时信号的困难。
$HDB_3$码(连“0”的个数不超过3个)
编码规则:
- 将消息代码转换为AMI码。即“0”不变,“1”变为+1、-1交替;
- 检查AMI码中连”0“的情况,将序列中“0000”分离,将第四个“0”变为“V”;
- 若相邻“V”之间有奇数个非”0“码取”000V“,偶数个非”0“码取”B00V“;
- 确定“V”:第一个“V”与前面相邻非“0”符号极性相同,以后交替取+V、-V;
- 确定“B”:“B”总是与前面的“1”或“V”符号相反;
- “V”总是与前面的“1”或“B”符号 相同,“1”总是与前面的“V”或“B”符号相反
双相码(曼彻斯特编码)
双极性NRZ波形,只有极性相反的两个电平,在每个码元间隔的中心点都存在电平跳变,所以含有丰富的位定时信息,且没有直流分量,编码过程也简单。缺点是占用带宽加倍,使频带利用率降低。
编码规则:“0”码用“01”两位码表示,“1”码用“10”两位码表示。(编码规则不唯一)
差分双相码
编码规则:有跳变表示二进制“1”,无跳变表示二进制“0”。
CMI码
编码规则:“1”码交替用“11”和“00”两位码表示;“0”码固定地用“01”表示。
块编码
nBmB码、nBmT码等
nBmB码:将原信息码流的n位二进制码分为一组,并置换成m位二进制码的新码组。
nBmT码:将n个二进制码变换成m个三进制码的新码组
优缺点:提供了良好的同步和检错功能,但带宽增大。
数字基带信号传输与码间串扰
数字基带信号传输系统的组成

数字基带传输系统
码间串扰(ISI)
由于系统传输总特性(包括收、发滤波器和信道的特性)不理想,导致前后码元的波形畸变、展宽,并使前面的波形出现很长的拖尾,蔓延到当前码元的抽样时刻上,从而对当前码元的判决造成干扰。码间串扰严重时,会造成错误判决。
数字基带信号传输的定量分析

数字基带传输系统
基带传输系统的总传输特性为
\[H(\omega)=G_T(\omega)C(\omega)G_R(\omega)\]接收滤波器输出信号
\[r(t)=d(t)*h(t)+n_R(t)=\sum\limits_{n=-\infty}^{\infty}a_nh(t-nT_s)+n_R(t)\]在\(t=kT_s+t_0\)时刻上对\(r(t)\)进行抽样
\[r(kT_s+t_0)=a_kh(t_0)+\sum\limits_{n\ne k}a_nh[(k-n)T_s+t_0]+n_R(kT_s+t_0)\]第一项是第k个接收码元波形的抽样值,第二项是除第k个码元以外的其它码元波形在第k个抽样时刻上的总和,它对当码元的判决起着干扰作用,所以称之为码间串扰值。
码间串扰值通常是一个随机变量。只有当码间串扰值和噪声足够小时,才能基本保证抽样判决的正确。
无码间串扰的基带传输特性
无码间串扰的条件
若想消除码间串扰,应使
\[\sum\limits_{n\ne k}a_nh[(k-n)T_s+t_0]=0\]这要求基带传输系统的冲激响应波形$h(t)$仅在本码元的抽样时刻上有最大值,并在其它码元的抽样时刻上均为零,则可消除码间串扰。
时域条件(这里假设\(t_0=0\)):
\[h(kT_s)= \left\{ \begin{array}{} 1, &k=0\\ 0, &k为其它整数 \end{array} \right.\]频域条件:
\[\sum\limits_{i}H(\omega+\frac{2\pi i}{T_s})=H(\omega-\frac{2\pi i}{T_s})+H(\omega)+H(\omega+\frac{2\pi i}{T_s})=T_s\]无码间串扰传输特性的设计
理想低通特性
\[H(\omega)= \left\{ \begin{array}{} T_s, &\mid\omega\mid\le T_B\\ 0, &\mid\omega\mid> T_B \end{array} \right.\]冲激响应为
\[h(t)=\frac{sin\frac{\pi}{T_s}t}{\frac{\pi}{T_s}t}=Sa(\pi t/T_s)\]带宽\(B=\frac{1}{2T_s}(Hz)\)
最高频带利用率\(\eta=R_B/B=2(Baud/Hz)\),这是无码间串扰下,基带系统所能达到的理想情况。
物理上不可实现。冲激响应\(h(t)\)作为传输波形是不适宜的,其衰减震荡幅度较大,如果抽样时刻稍有偏差,就会引起严重的码间串扰。
余弦滚降特性
\[H(\omega)= \left\{ \begin{array}{} T_s, &0\le\mid\omega\mid<\frac{(1-\alpha)\pi}{T_S}\\ \frac{T_s}{2}[1+sin\frac{T_s}{2\alpha}(\frac{\pi}{T_s}-\omega)], & \frac{(1-\alpha)\pi}{T_S}\le\mid\omega\mid<\frac{(1+\alpha)\pi}{T_S}\\ 0, &\mid\omega\mid>\frac{(1+\alpha)\pi}{T_S} \end{array} \right.\]相应的\(h(t)\)为
\[h(t)=\frac{sin\pi t/T_s}{\pi t/T_s}\bullet\frac{cos\alpha\pi t/T_s}{1-4\alpha^2t^2/T_s^2}\]\(\alpha\)为滚降系数,用于描述滚降程度,\(\alpha=f_{\Delta}/f_N\)
带宽\(B=(1+\alpha)f_N\)
最高频带利用率\(\eta=\frac{R_B}{B}=\frac{2}{1+\alpha}(Baud/Hz)\)
当\(\alpha=1\)时,
\[H(\omega)= \left\{ \begin{array}{} \frac{T_s}{2}(1+cos\frac{\omega T_S}{2}), &\mid\omega\mid\le\frac{2\pi}{T_S}\\ 0, &\mid\omega\mid>\frac{2\pi}{T_S} \end{array} \right.\]\(h(t)\)为
\[h(t)=\frac{sin\pi t/T_s}{\pi t/T_s}\bullet\frac{cos\alpha\pi t/T_s}{1-4t^2/T_s^2}\]频带利用率\(\eta=1(Baud/Hz)\)
基带传输系统的抗噪声性能
二进制双极性基带系统
抽样判决器输入端的混合波形在抽样时刻的取值为
\[x(kT_s)= \left\{ \begin{array}{} A+n_R(kT_s),&发送“1”时\\ -A+n_R(kT_s),&发送“0”时 \end{array} \right.\]发送“1”时,\(A+n_R(kT_s)\)的一维概率密度函数为
\[f_1(x)=\frac{1}{\sqrt{2\pi}\sigma_n}exp(-\frac{(x-A)^2}{2\sigma_n^2})\]发送“0”时,\(-A+n_R(kT_s)\)的一维概率密度函数为
\[f_0(x)=\frac{1}{\sqrt{2\pi}\sigma_n}exp(-\frac{(x+A)^2}{2\sigma_n^2})\]在-A~+A之间选择一个适当的电平\(V_d\)作为判决门限
发“1”错判为“0”的概率为
\[\begin{align} P(0/1) &= P(x\le V_d) = \int_{-\infty}^{V_d}f_1(x)dx\\ &= \int_{-\infty}^{V_d}\frac{1}{\sqrt{2\pi}\sigma_n}exp(-\frac{(x-A)^2}{2\sigma_n^2})dx =\frac{1}{2}+\frac{1}{2}erf(\frac{V_d-A}{\sqrt{2}\sigma_n}) \end{align}\]发“0”错判为“1”的概率为
\[\begin{align} P(1/0) &= P(x>V_d) = \int_{V_d}^{\infty}f_0(x)dx\\ &= \int_{V_d}^{\infty} \frac{1}{\sqrt{2\pi}\sigma_n}exp(-\frac{(x+A)^2}{2\sigma_n^2})dx =\frac{1}{2}-\frac{1}{2}erf(\frac{V_d+A}{\sqrt{2}\sigma_n}) \end{align}\]二进制基带传输系统的总误码率为
\[P_e=P(1)P(0/1)+P(0)P(1/0)\]最佳门限电平为(最大似然法则)
\[V_d^*=\frac{\sigma_n^2}{2A}ln\frac{P(0)}{P(1)}\]若\(P(0)=P(1)=1/2\),则\(V_d^*=0\)
基带传输的总误码率为\(P_e=\frac{1}{2}[P(0/1)+P(1/0)]=\frac{1}{2}erfc(\frac{A}{2\sigma_n})\)
二进制单极性基带系统
最佳门限电平
\[V_d^*=\frac{A}{2}+\frac{\sigma_n^2}{A}ln\frac{P(0)}{P(1)}\]当\(P(0)=P(1)=1/2\),有\(V_d^*=\frac{A}{2}\)
基带传输的总误码率为\(P_e=\frac{1}{2}[P(0/1)+P(1/0)]=\frac{1}{2}erfc(\frac{A}{2\sqrt{2}\sigma_n})\)
当比值\(A/\sigma_n\)一定时,双极性基带系统的误码率比单极性的低,抗噪声性能好。此外,在等概条件下,双极性的最佳判决门限为0,与信号幅度无关,因而不随信道特性变化而变,故能保持最佳状态。
时域均衡
时域均衡原理
在接收滤波器和抽样判决器之间插入一个可调滤波器—横向滤波器,其冲激响应为
\[h_T(t)=\sum\limits_{n=-\infty}^{\infty}C_n\delta(t-nT_s)\]插入滤波器的频率特性为
\[\begin{align} T(\omega) &=\frac{T_s}{\sum\limits_{i}H(\omega+\frac{2\pi i}{T_s})},\mid\omega\mid\le\frac{\pi}{T_s}\\ &=\sum\limits_{n=-\infty}^{\infty}C_ne^{-jnT_s\omega} \end{align}\]其中,
\[\begin{align} C_n &= \frac{T_s}{2\pi}\int^{\pi/T_s}_{-\pi/T_s}T(\omega)e^{jn\omega T_s}d\omega\\ &= \frac{T_s}{2\pi}\int^{\pi/T_s}_{-\pi/T_s}\frac{T_s}{\sum\limits_{i}H(\omega+\frac{2\pi i}{T_s})}e^{jn\omega T_s}d\omega \end{align}\]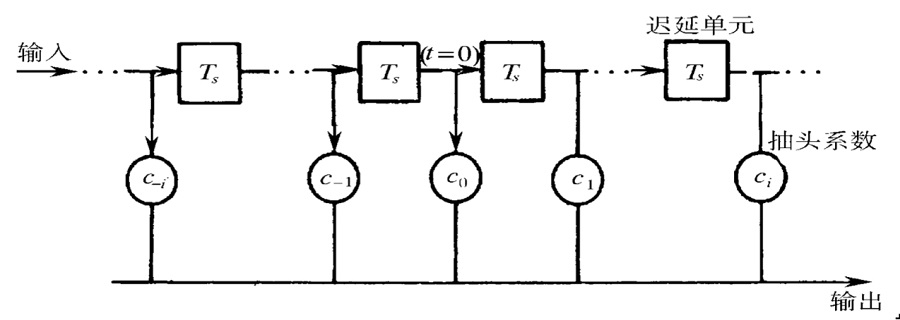
横向滤波器
理论上,无限长的横向滤波器可以完全消除抽样时刻上的码间串扰,但实际中是不可能实现的。
设有2N+1个抽头的横向滤波器,均衡后的输出波形为
\[y_k=\sum\limits_{i=-N}^{N}C_ix_{k-i}\]均衡准则与实现
最小峰值失真法—迫零调整法
峰值失真定义为
\[D=\frac{1}{y_0}\sum\limits^{\infty}_{\substack{k=-\infty\\k\ne0}}\mid y_k\mid\]未均衡前的输入峰值失真为
\[D_0=\frac{1}{x_0}\sum\limits^{\infty}_{\substack{k=-\infty\\k\ne0}}\mid x_k\mid\]将\(x_k\)归一化,则\(x_0=1\)
\[D_0=\sum\limits^{\infty}_{\substack{k=-\infty\\k\ne0}}\mid x_k\mid\]将\(y_k\)也归一化,得
\[\sum\limits^{N}_{i=-N}C_ix_{-i}=1\]因此,抽头系数需满足的方程为
\[\left\{ \begin{array}{} \sum\limits^{N}_{i=-N}C_ix_{-i}=1 &k=0\\ \sum\limits_{i=-N}^{N}C_ix_{k-i}=0 &k=\pm1,\pm2,...,\pm N \end{array} \right.\]最小均方失真法自适应均衡器
自适应均衡器不再利用专门的测试单脉冲进行误差的调整,而是在传输数据期间借助信号本身来调整增益。关于自适应滤波器的介绍,本站将在后续更新。
抽头增益的调整可以借助对误差\(e_k\)和样值\(x_{k-i}\)乘积的统计平均值。若这个统计平均值不等于零,则应通过增益调整使其向零值变化,直到使其等于零为止。
数字信号的最佳接收
数字信号的统计特性
设接收电压\(r(t)\)为信号电压\(s(t)\)和噪声电压\(n(t)\)之和,
\[r(t)=s(t)+n(t)\]当发送信号码元“0”的信号波形为\(s_0(t)\)时,接收电压\(r(t)\)的k维联合概率密度为
\[f_0(r)=\frac{1}{(\sqrt{2\pi}\sigma_n)^k}exp\{-\frac{1}{n_0}\int_0^{T_s}[r(t)-s_0(t)]^2dt\}\]当发送信号码元“1”的信号波形为\(s_1(t)\)时,接收电压\(r(t)\)的k维联合概率密度为
\[f_1(r)=\frac{1}{(\sqrt{2\pi}\sigma_n)^k}exp\{-\frac{1}{n_0}\int_0^{T_s}[r(t)-s_1(t)]^2dt\}\]数字信号的最佳接收
最佳的准则—错误概率最小
判决规则:
\[\begin{align} P_e &= P(1)P(0/1)+P(0)P(1/0)\\ &= P(1)\int_{-\infty}^{r_0'}f_1(r)dr + P(0)\int_{r_0'}^{\infty}f_0(r)dr \end{align}\]对\(P_e\)求导,得出最佳分界点\(r_0\)的条件
\[P(1)f_1(r_0)-P(0)f_0(r_0)=0\]即
\[\frac{P(1)}{P(0)}=\frac{f_0(r_0)}{f_1(r_0)}\]当先验概率相等时,\(f_1(r_0)=f_0(r_0)\),最佳分界点位于两条曲线交点处的r值上。
最大似然准则:若\(\frac{P(1)}{P(0)}<\frac{f_0(r)}{f_1(r)}\),则判为“0”;若\(\frac{P(1)}{P(0)}>\frac{f_0(r_0)}{f_1(r_0)}\),则判为“1”。
在发送“0”和发送“1”的先验概率相等时,条件简化为:若\(f_0(r)>f_1(r)\),则判为”0“;若\(f_0(r)<f_1(r)\),则判为”1“。
理论上可以得到最佳的误码率。
1 相关接收法
将接收电压的概率密度代入判决准则式,若
\[P(1)exp\{-\frac{1}{n_0}\int_0^{T_s}[r(t)-s_1(t)]^2dt\}<P(0)exp\{-\frac{1}{n_0}\int_0^{T_s}[r(t)-s_0(t)]^2dt\}\]则判断发送码元为\(s_0(t)\)。
若
\[P(1)exp\{-\frac{1}{n_0}\int_0^{T_s}[r(t)-s_1(t)]^2dt\}>P(0)exp\{-\frac{1}{n_0}\int_0^{T_s}[r(t)-s_0(t)]^2dt\}\]则判断发送码元为\(s_1(t)\)。
将上两式取对数,得到
\[n_0ln\frac{1}{P(1)}+\int_0^{T_s}[r(t)-s_1(t)]^2dt>n_0ln\frac{1}{P(0)}+\int_0^{T_s}[r(t)-s_0(t)]^2dt\]则判断发送码元为\(s_0(t)\),反之则判断发送码元为\(s_1(t)\)。
假设两个码元能量相同,即\(\int_0^{T_s}s_0(t)dt=\int_0^{T_s}s_1(t)dt\)
上式进一步简化为
\[W_1+\int_0^{T_s}r(t)s_1(t)dt<W_0+\int_0^{T_s}r(t)s_0(t)dt\]式中,\(W_1=\frac{n_0}{2}lnP(0)\),\(W_0=\frac{n_0}{2}lnP(0)\)
此时判断发送码元是\(s_0(t)\),反之则判断发送码元为\(s_1(t)\)。
最佳接收机如下
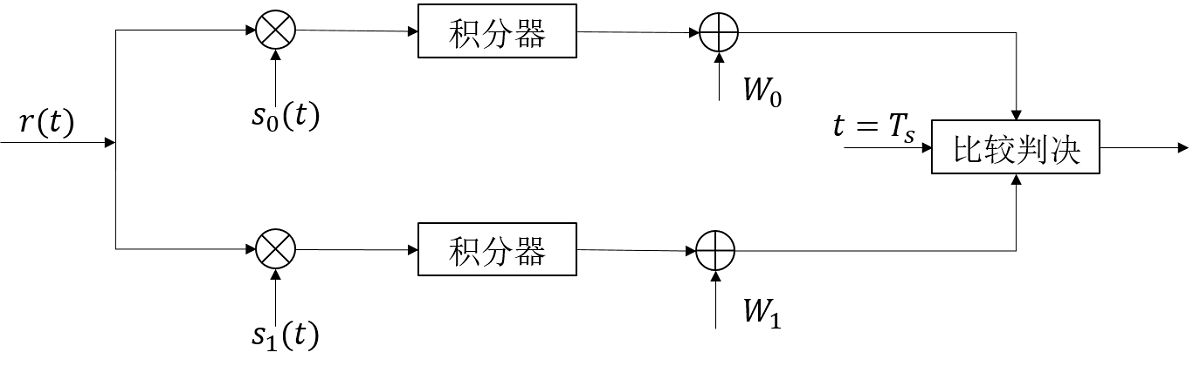
最佳接收机
若先验概率相等,则\(W_0=W_1\),判决准则简化为\(\int_0^{T_s}r(t)s_1(t)dt<\int_0^{T_s}r(t)s_0(t)dt\),原理方框图简化成
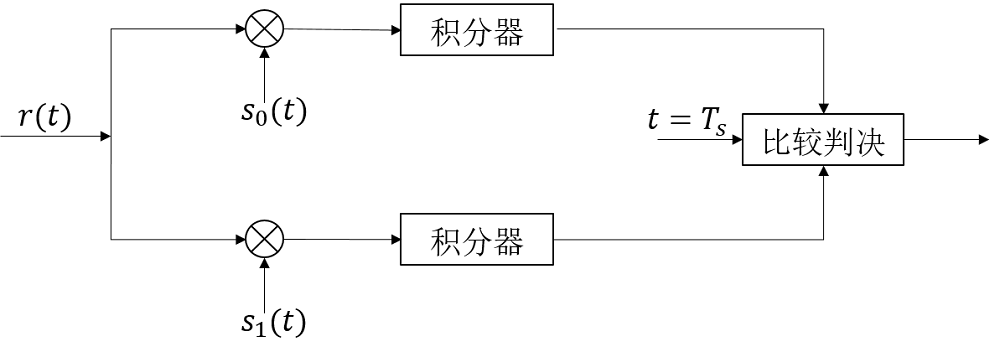
最佳接收机
最佳接收机的核心是相乘和积分构成的相关运算,所以常称这种算法为相关接收法。
最佳接收的误码率
码元的相关系数
\[\rho=\frac{\int_0^{T_B}s_0(t)s_1(t)dt}{\sqrt{[\int_0^{T_B}s_0^2(t)dt][\int_0^{T_B}s_1^2(t)dt]}}\]误码率
\[\begin{align} P_e &= P(1)P(0/1)+P(0)P(1/0)\\ &= P(1)[\frac{1}{\sqrt{2\pi}\sigma_n}\int_{-\infty}^{a}e^{-\frac{x^2}{2\sigma_\xi}}dx]+P(0)[\frac{1}{\sqrt{2\pi}\sigma_n}\int_{-\infty}^{b}e^{-\frac{x^2}{2\sigma_\xi}}dx] \end{align}\]先验概率相等时
\[P_e=\frac{1}{2}\left[1-erf\left(\sqrt{\frac{E_b(1-\rho)}{2n_0}}\right)\right]=\frac{1}{2}erfc\left[\sqrt{\frac{E_b(1-\rho)}{2n_0}}\right]\]先验概率不等时的误码率将略小于先验概率相等时的误码率。
相关系数对误码率的影响
当两种码元的波形相反,相关系数最小,即\(\rho=-1\)时,误码率最小(2PSK)
\[P_e=\frac{1}{2}\left[1-erf\left(\sqrt{\frac{E_b}{n_0}}\right)\right]=\frac{1}{2}erfc\left[\sqrt{\frac{E_b}{n_0}}\right]\]当两种码元正交,相关系数$\rho=0$时,误码率为(2FSK)
\[P_e=\frac{1}{2}\left[1-erf\left(\sqrt{\frac{E_b}{2n_0}}\right)\right]=\frac{1}{2}erfc\left[\sqrt{\frac{E_b}{2n_0}}\right]\]当两种码元中有一种的能量为零,误码率为(2ASK)
\[P_e=\frac{1}{2}\left[1-erf\left(\sqrt{\frac{E_b}{4n_0}}\right)\right]=\frac{1}{2}erfc\left[\sqrt{\frac{E_b}{4n_0}}\right]\]当系统带宽为\(1/T_s\)时,\(\frac{E_s}{n_0}=\frac{P_s}{P_n}\),相当于信噪比。
误码率曲线如下
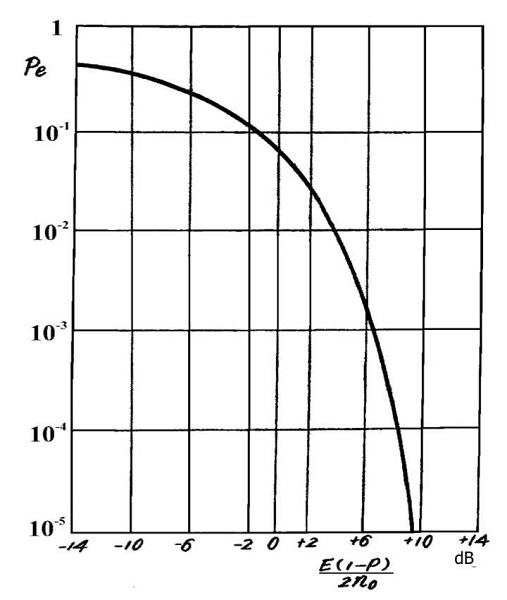
误码率曲线
实际接收机与最佳接收机性能比较
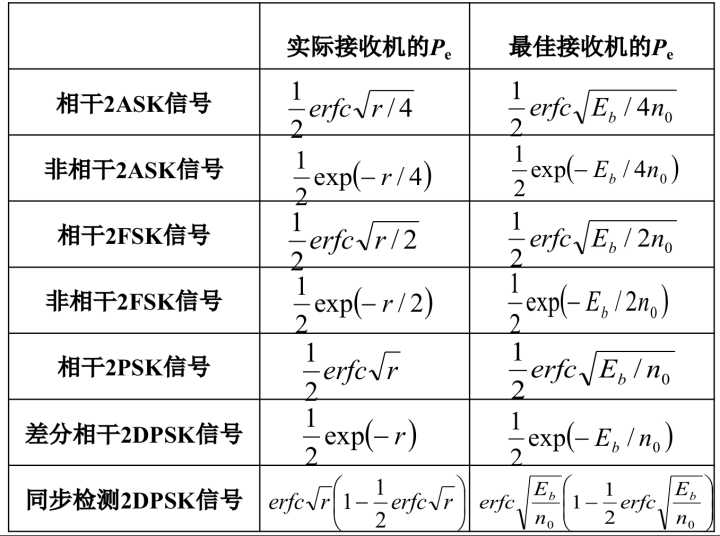
实际接收机与最佳接收机性能比较
实际接收机的性能总是比不上最佳接收机的性能。
2 匹配滤波接收法
用线性滤波器对接收信号滤波时,使抽样时刻上线性滤波器的输出信噪比最大的线性滤波器称为匹配滤波器。
最佳接收滤波器特性(根据施瓦兹不等式得到,详细内容将在信号检测与估计中详述)
\[H(f)=kS^*(f)e^{-j2\pi ft_0}\\ h(t)=ks(t_0-t)\]此时得到最大输出信噪比\(2E/n_0\)
接收滤波器输入端的信号码元在抽样时刻\(t_0\)之后必须为零。一般不希望再码元结束很久之后才抽样,故通常选择在码元末尾抽样,即选择\(t_0=T_s\),因此
\[h(t)=ks(T_s-t)\]匹配滤波器输出信号码元波形是输入信号码元波形的自相关函数的k倍。通常取k=1。
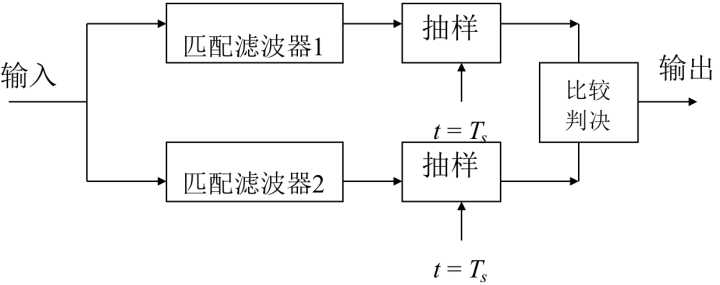
匹配滤波器
最大输出信噪比和信号波形无关,只决定于信号能量E与噪声功率谱密度\(n_0\)之比,所以这种匹配滤波法对任何一种数字信号波形都适用,不论是基带数字信号还是已调数字信号。
匹配滤波器和相关接收法完全等效,都是最佳接收方法。
最佳基带传输系统
理想信道的最佳传输系统
假设信道传输函数\(C(f)=1\),此时基带系统的传输特性变为
\[H(f)=G_T(f)G_R(f)\]其中,接收匹配滤波器的传输函数为
\[G_R(f)=G_T^*(f)e^{-j2\pi ft_0}\]发送滤波器和接收滤波器应满足的条件为
\[G_R(f)=H^{1/2}(f)\] \[G_R(f)=H^{1/2}(f)\]非理想信道的最佳基带传输系统
匹配滤波器的传输函数为
\[G_R'(f)=G_T^*(f)\bullet C^*(f)\]基带传输系统的总传输特性为
\[H(f)=\mid G_T(f)\mid^2\mid C(f)\mid^2\]为消除码间串扰,应使$H(f)$满足
\[\sum_iH(f+i/T_s)=T_s,\mid f\mid<1/2T_s\]为此,可以在接收端增加一个横向均衡滤波器\(T(f)\)。
数字带通传输系统
数字调制技术有两种方法:
- 利用模拟调制的方法实现数字式调制,即把数字基带信号当作模拟信号的特殊情况处理
- 利用数字信号的离散取值特点,通过开关键控载波,实现数字调制,通常称为键控法
基本键控方式:振幅键控、频移键控、相移键控
二进制数字调制原理
2ASK—二进制振幅键控
也称OOK(通-断键控)
表达式
\[e_{2ASK}(t)=s(t)cos\omega_ct\]其中,
\[s(t)=\sum\limits_{n}a_ng(t-nT_S)\]产生方法
- 模拟调制法(相乘器法)
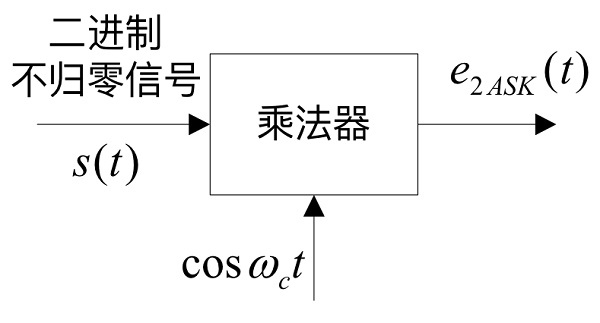
2ASK模拟调制法
- 键控法
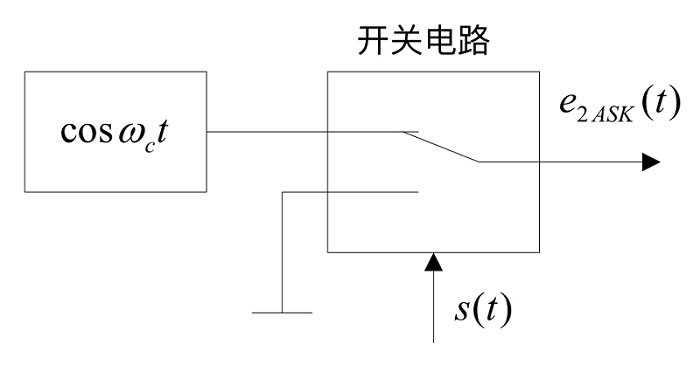
2ASK键控法
解调方法
- 非相干解调(包络检波法)

2ASK包络检波法
- 相干解调(同步检测法)
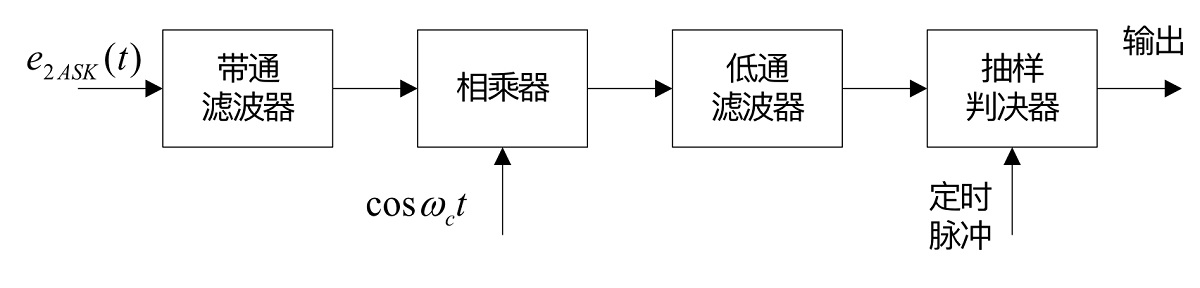
2ASK相干解调法
功率谱密度
\[\begin{aligned} P_{2ASK}(f) &= \frac{1}{4}[P_s(f+f_c)+P_s(f-f_c)]\\ &= \frac{T_s}{16}\left[\mid\frac{sin\pi(f+f_c)T_s}{\pi(f+f_c)T_s}\mid^2+\mid\frac{sin\pi(f-f_c)T_s}{\pi(f-f_c)T_s}\mid^2\right]+\frac{1}{16}[\delta(f+f_c)+\delta(f-f_c)] \end{aligned}\]2ASK信号的功率谱是基带信号功率谱的线性搬移。
带宽(第一个谱零点位置)
\[B_{2ASK}=2f_s\]2ASK信号的传输带宽是码元速率的两倍。
2FSK—二进制频移键控
表达式
载波的频率随二进制基带信号在\(f_1\)和\(f_2\)两个频率点间变化
\[e_{2FSK}(t)= \left\{ \begin{align} Acos(\omega_1t+\varphi_n),&发送“1”时\\ Acos(\omega_2t+\theta_n),&发送“0”时\\ \end{align} \right.\]可简化为
\[e_{2FSK}(t)=s_1(t)cos\omega_1t+s_2(t)cos\omega_2t\]产生方法
- 模拟调频电路实现(信号在相邻码元之间的相位是连续变化的)
- 键控法实现(相邻码元之间的相位不一定连续)
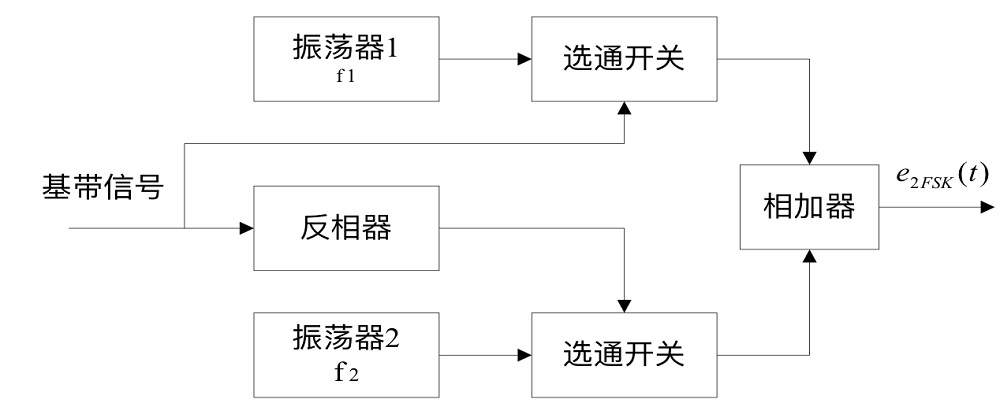
2FSK键控法
解调方法
- 非相干解调
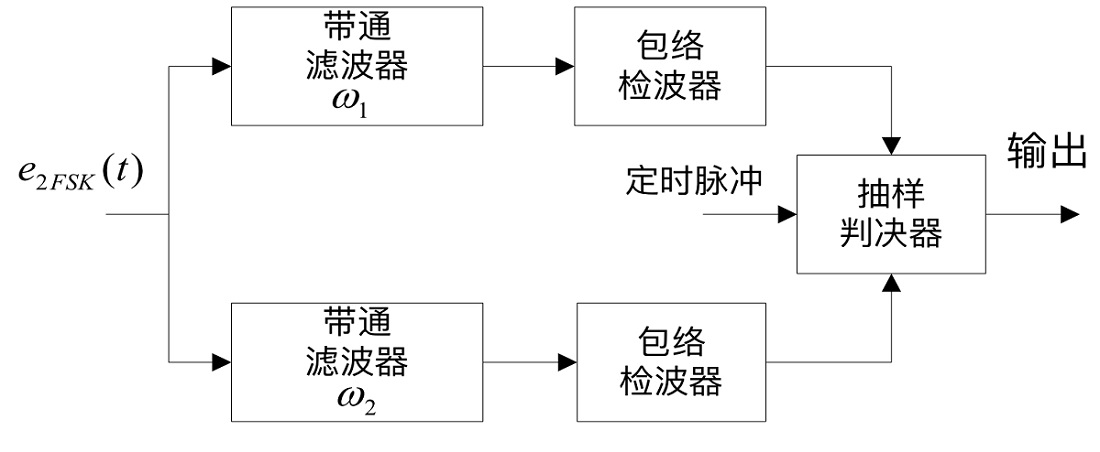
2FSK包络检波法
- 相干解调
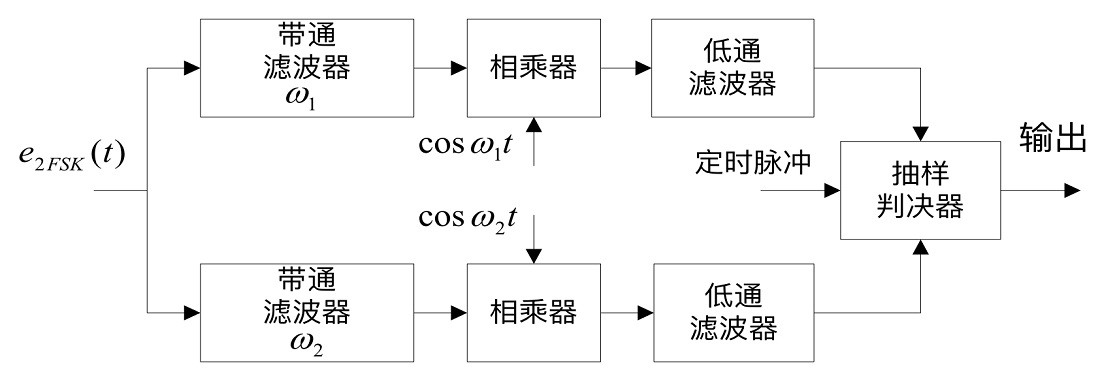
2FSK相干解调法
- 其它解调方法:鉴频法、差分检测法、过零检测法等
功率谱密度
\[\begin{align} P_{2FSK}(f) = &\frac{1}{4}[P_{s1}(f-f_1)+P_{s1}(f+f_1)]+\frac{1}{4}[P_{s2}(f-f_2)+P_{s2}(f+f_2)]\\ = &\frac{T_s}{16}\left[\bigg|\frac{sin\pi(f+f_1)T_s}{\pi(f+f_1)T_s}\bigg|^2+\bigg|\frac{sin\pi(f-f_1)T_s}{\pi(f-f_1)T_s}\bigg|^2\right]\\ &+\frac{T_s}{16}\left[\bigg|\frac{sin\pi(f+f_2)T_s}{\pi(f+f_2)T_s}\bigg|^2+\bigg|\frac{sin\pi(f-f_2)T_s}{\pi(f-f_2)T_s}\bigg|^2\right]\\ &+\frac{1}{16}[\delta(f+f_1)+\delta(f-f_1)+\delta(f+f_2)+\delta(f-f_2)] \end{align}\]带宽(第一个谱零点位置)
\[B_{2FSK}=\mid f_2-f_1\mid +2f_s\]频谱效率更低
2PSK—二进制相移键控
表达式
\[e_{2PSK}(t)=Acos(\omega_ct+\varphi_n)\]其中,
\[\varphi_n= \left\{ \begin{align} 0,&发送“0”时\\ \pi,&发送“1”时 \end{align} \right.\]也可以表示成
\[e_{2PSK}(t)=s(t)cos\omega_ct\]其中,
\[s(t)=\sum\limits_{n}a_ng(t-nT_S)\] \[a_n= \left\{ \begin{align} 1,&概率为P\\ -1,&概率为1-P \end{align} \right.\]产生方法
- 模拟调制
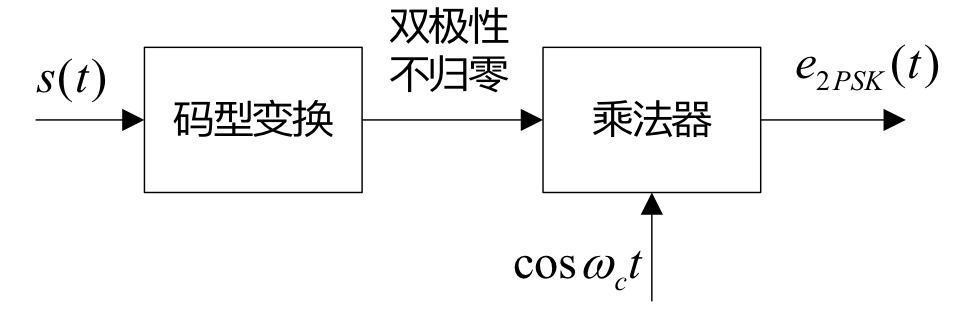
2PSK模拟调制法
- 键控法
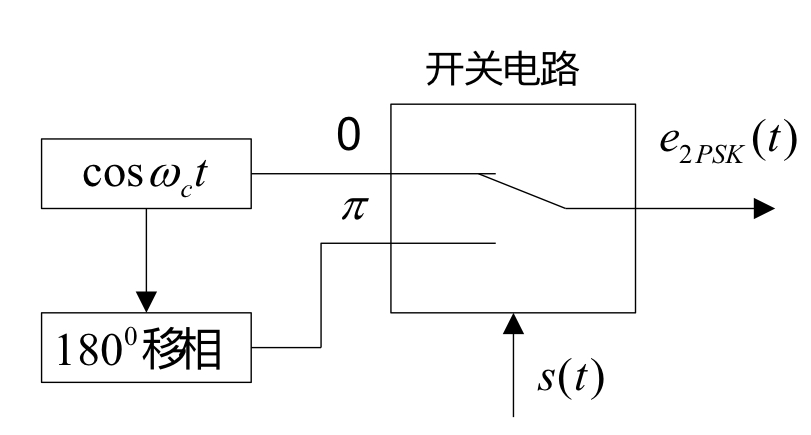
2PSK键控法
解调方法
- 相干解调

2PSK相干解调
缺点:“倒π”现象或“反相工作”。可以看到这里即使采用相干解调仍然出现了相位模糊问题。
功率谱密度
\[\begin{aligned} P_{2PSK}(f) &= \frac{1}{4}[P_s(f+f_c)+P_s(f-f_c)]\\ &= \frac{T_s}{16}\left[\bigg|\frac{sin\pi(f+f_c)T_s}{\pi(f+f_c)T_s}\bigg|^2+\bigg|\frac{sin\pi(f-f_c)T_s}{\pi(f-f_c)T_s}\bigg|^2\right] \end{aligned}\]无离散谱。
可以看作是双极性基带信号作用下的调幅信号。
带宽
\[B_{2PSK}=2f_s\]2DPSK—二进制差分相移键控
原理
\[\Delta\varphi= \left\{ \begin{align} 0,&数字信息“0”\\ \pi,&数字信息“1” \end{align} \right.\]2DPSK信号不直接代表基带信号,前后码元的相对相位才决定信息符号。
产生方法
首先对二进制数字基带信号进行差分编码,即把数字信息序列的绝对码变成相对码,根据相对码进行绝对调相,从而产生二进制差分相移键控信号。
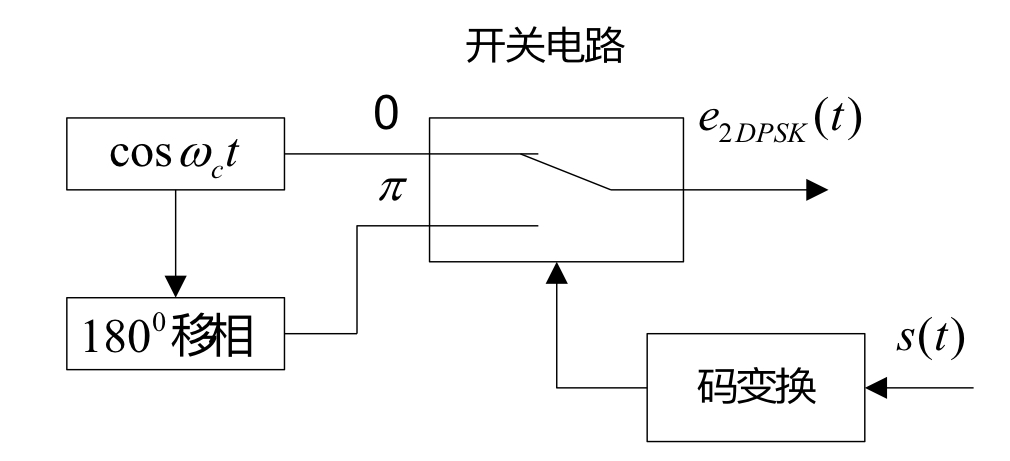
2DPSK键控法
解调方法
- 相干解调+码反变换法

2DPSK相干解调加码反变换
解决了相位模糊的问题。
- 差分相干解调(相位比较)法

2DPSK差分相干解调
功率谱密度
与2PSK相同
带宽
\[B_{2DPSK}=2f_s\]2DPSK的抗加性白噪声的性能比2PSK要差。
二进制数字调制系统的抗噪声性能
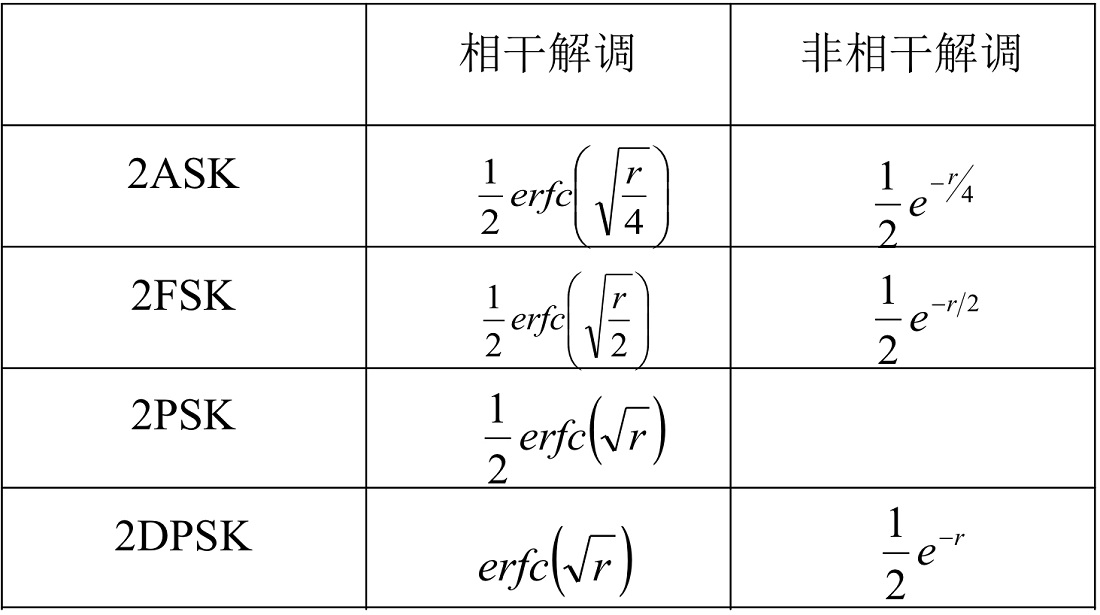
二进制数字调制系统的抗噪声性能
差错控制编码
概述
信道可分为随机信道、突发信道、混合信道。
差错控制技术:检错重发、前向纠错(FEC)、反馈校验、检错删除。
检错重发—自动要求重发(ARQ)
停止等待(stop-and-wait)ARQ系统、拉后(pull-back)ARQ系统
纠错编码
差错控制编码常称为纠错编码,不同的编码方法有不同的检错或纠错能力。
将信息码分组,为每组信码附加若干监督码的编码称为分组码。
分组码一般用符号(n,k)表示,n是码组的总位数,k是码组中信息码元的数目,n-k=r为码组中的监督码元数目。
码组中“1”的个数为码组的数量,简称码重。两个码组中对应位上数字不同的位数称为码组的距离,简称码距,又称汉明距离。
一种编码的最小码距关系着这种编码的检错和纠错能力。
- 为检错e个编码,要求最小码距\(d_0\ge e+1\)
- 为了纠正t个错码,要求最小码距\(d_0\ge 2t+1\)
- 为了纠正t个错码,同时检测e个错码,要求最小码距\(d_0\ge e+t+1\)
简单的实用编码
- 奇偶监督码:增加一位监督位,使“1”的数目为偶数(或奇数)。
- 二维奇偶监督码:将奇偶监督码每个写成一行,再按列的方向增加第二维监督位。适用于检测突发错码。
- 恒比码:每个码组含有相同数目的“1”(和“0”)。
- 正反码:当信息位中有奇数个“1”时,监督位时信息位的简单重复;当信息位有偶数个“1”时,监督位是信息位的反码。